研究背景
ロボットで物体をつかむ場合,視覚センサ(カメラ)と触覚センサ(圧力センサ)が一般的に用いられます.
しかし,視覚センサには推定誤差や死角があり,触覚センサは触れるまで物体を検出できない問題があります.
これらの問題により,物体をつかむ動作の過程でセンシング情報に誤差や欠落が生じ,
確実で高速な把持が困難になります.
私の研究では,視覚/触覚センサに加えて近接覚センサを用いる把持戦略を提案しています.
近接覚センサはロボット表面に実装するタイプのセンサで,接近してきた物体との位置関係(距離,傾き角度など)を触れずに検出します.
ロボットと物体間の位置関係を近接覚センサで直接検出することで,
視覚センサの推定誤差や死角による情報の欠落を補うことができます.
さらに、近接覚センサの情報を基に物体をつかむ姿勢をあらかじめ調整することで,
確実に物体をつかむことが可能となります.
高速近接覚センサ
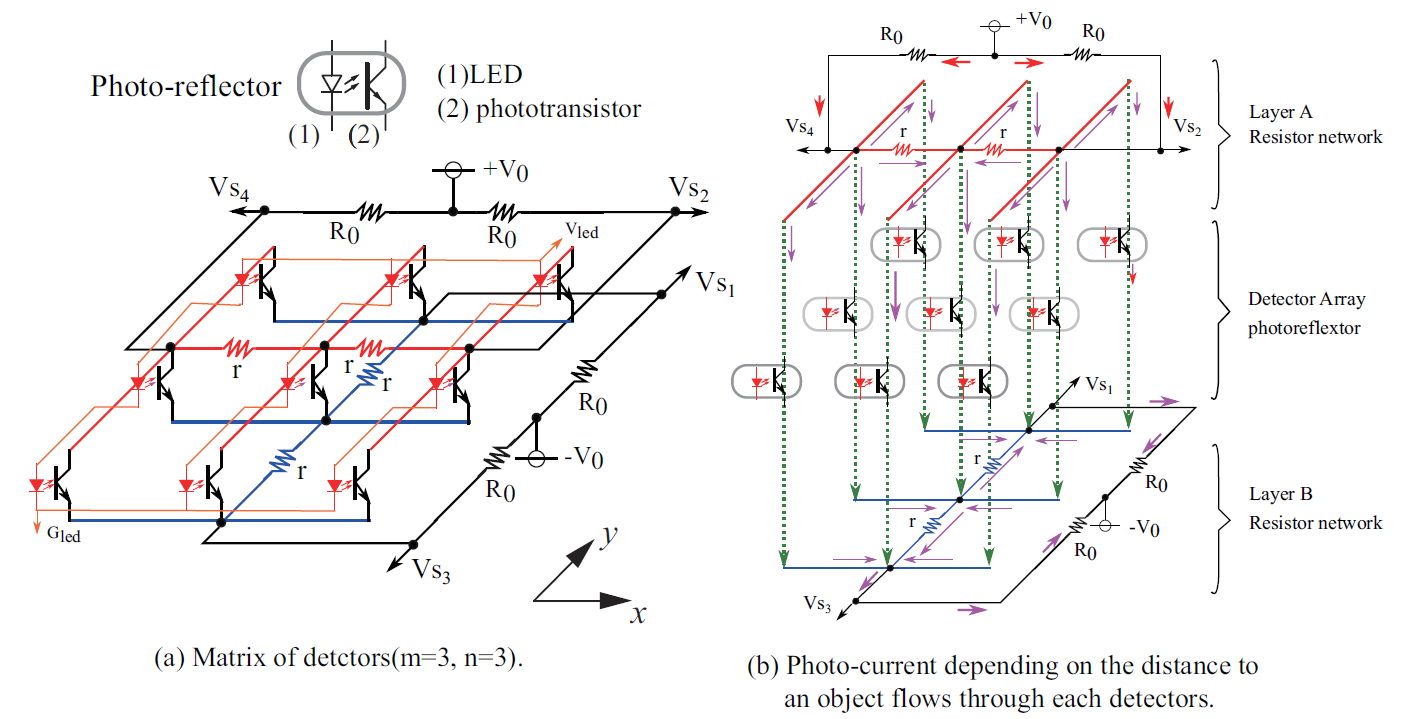
本センサは,計測周期1/1000秒で物体との位置関係を計測可能です. センサ本体は,赤外光の発光・受光素子(フォトリフレクタ)と抵抗回路網などの アナログ回路のみで構成されるため, 小型・薄型、省配線(受光素子数によらず信号線は4本)などの特徴があります(以下の図参照). 曲面への実装も可能ですので、ロボットハンド指先や掌に容易に実装可能です.
センサ設計とシミュレーション
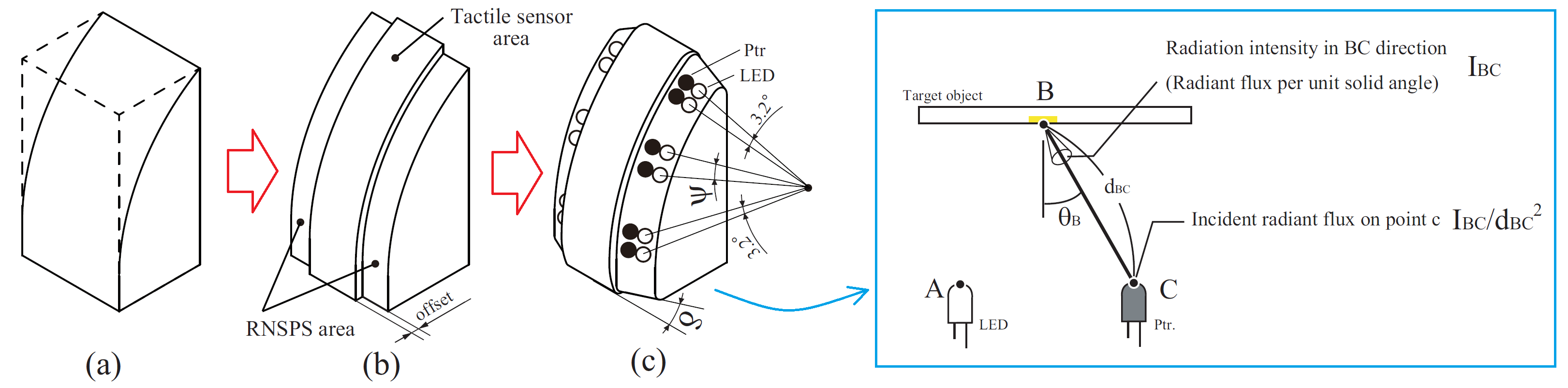
高速近接覚センサのもう一つの特徴は,発光・受光素子の配置間隔・角度を調整することで, 望ましいセンサ出力特性をあらかじめ設計できる点です.ただし,このセンサは複数の発光素子を同時に点灯させ複数個所で受光するため, 解析的に光の反射をモデル化することは困難です. そこで,専用の光学シミュレータ(レイトレーシング法)を使用して 適切な素子配置設計を行っています.以下の図の通り,ハンド指先上のセンサでは, 指先面状に配置する素子の個数と配置を変化させた際のセンサ出力の特徴を シミュレーション上で検証し,物体の姿勢と距離を同時に検出するための適切な素子配置数, 間隔を選定しています.
ハンド・アーム制御
ハンド指先上の近接覚センサフィードバックにより,3指8自由度ハンドと アーム手先位置・姿勢の6自由度の統合制御を実現しました. 以下の図がロボットシステムの接続図です.一つの制御器(dSPACE)でハンドとアームを 制御するため,ハンドとアーム間の制御での通信ディレイがなく,リアルタイム制御に適した システムです.
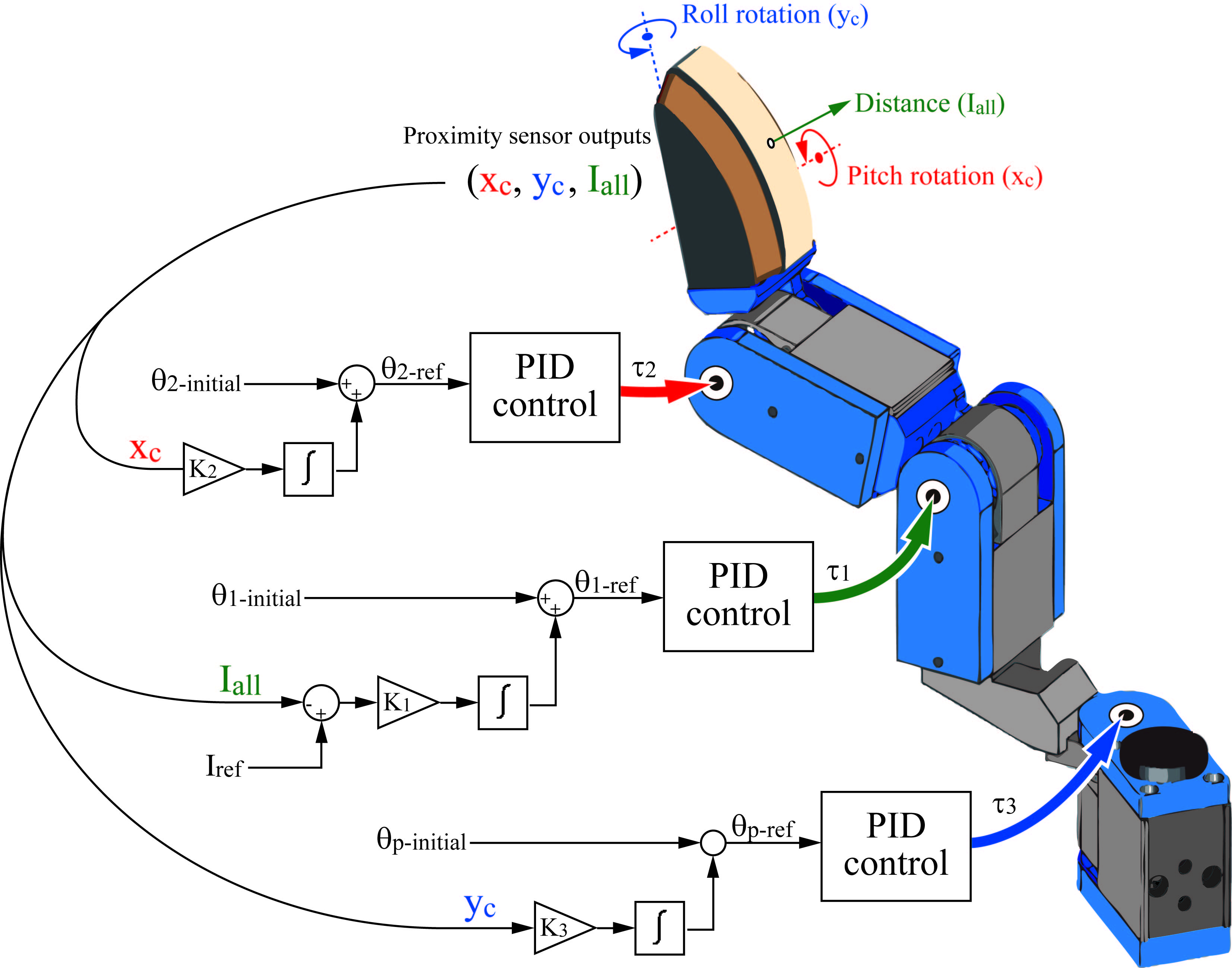
以下はハンド1指のコントロールブロック図です.1指の近接覚センサの3つの出力(距離,物体面の 傾き角度1,傾き角度2に関するセンサ出力)によって,1指3関節を独立して制御する手法を提案しています. 非常に単純な制御則のため,汎用モータドライバ内に制御を組み込むことも容易であり, 運動学的な特異点の問題が生じない利点もあります.
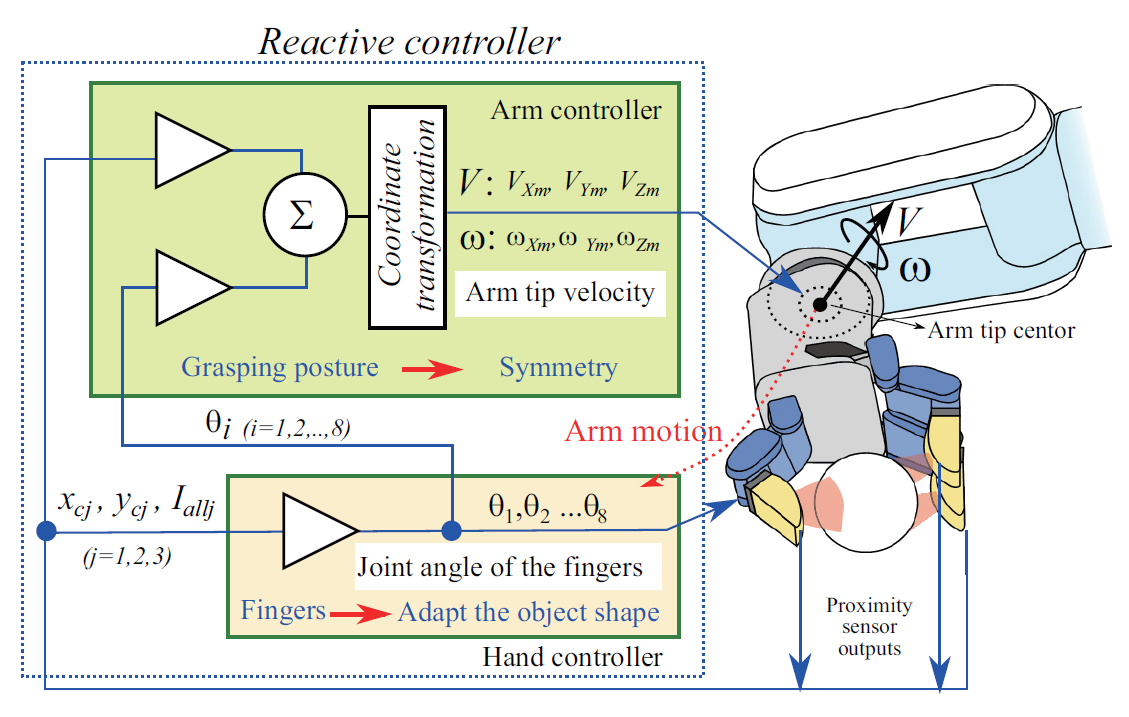
以下はハンドとアーム両方のコントロールブロック図です. ハンド各指の制御則で3指の把持姿勢が非接触で調整されることを利用し, アーム側はこの把持姿勢が左右対称となるようにアーム手先位置・姿勢を調整します. 予測や最適化制御を使用しない単純な方法ですが,プログラムの変更なしで様々な物体形状, 位置・姿勢に合わせてハンドとアームの位置を制御することが可能です. 動く物体にも高速に追従し,リアルタイムで把持姿勢と手先位置を同時に調整できます.
動画
発表文献
- Keisuke Koyama, Makoto Shimojo, Aiguo Ming and Masatoshi Ishikawa: Integrated control of a multiple-degree-of-freedom hand and arm using a reactive architecture based on high-speed proximity sensing, The International Journal of Robotics Research, Vol. 38, No. 14, pp.1717–1750, 2019.