研究背景・概要
ほとんどのロボットハンドの関節は摩擦が大きいため外側から力を加えても逆回転しません. 摩擦により位置決めしやすくなりますが,対象物や机に衝突した際に壊れる危険があります. 一方で,もし小さな力が加わった際も関節が逆回転し,この回転角度を角度センサで計測できれば, 物体に接触しながら把持することが可能になります. 接触することで対象物と指先との位置関係が決まるため,アーム手先位置のティーチング作業を減らすことができ, ティーチングレス化の促進が期待できます. この接触しながらつかむ方法を実現するためには,1)関節での摩擦が小さいハンドと, 2)接触を維持する制御の2つが重要となります. 以上の背景から,私の研究では小型・低摩擦アクチュエータを開発し, 衝撃吸収制御と組み合わせることで,接触しながら物体をつかむ方法を提案しています.
マグリンケージ
マグリンケージは小型ダイレクトドライブモータと, 直交軸変換型の磁石歯車,小型の遊星減速機で構成されます. マグリンケージ8個で構成したハンドの外観と関節駆動系の模式図は以下の通りです.
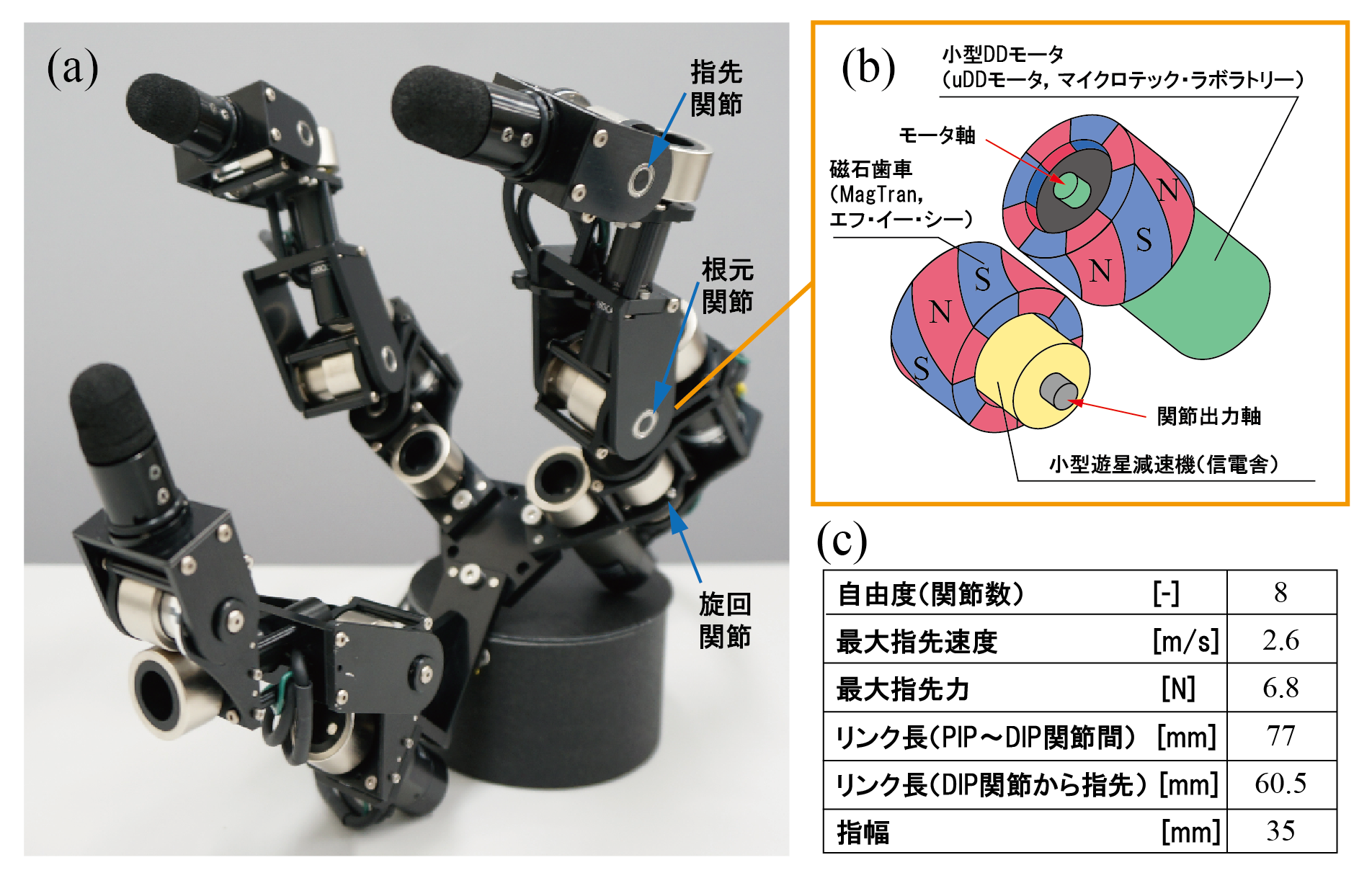
磁石歯車を用いることで,低バックラッシ,低摩擦を実現しています. また,過負荷が加わった際は磁石歯車が滑ることでトルクリミッタの役割を果たします. 磁石歯車のみでは発揮できる最大トルクに限界がありますが,減速比1/16.4の遊星減速機により 磁石歯車の伝達トルクを増幅することで実用的な把持力を発揮できます(1指当たり最大6.8N). 各関節は摩擦が極めて小さく,かつ逆回転角度をモータ側のエンコーダで計測可能です. 逆回転角度を基にスティッフネス制御(バネ挙動)やダンピング制御(ダンパ挙動)を行うことで, 物体と衝突後に接触を維持する制御(衝撃吸収制御)が可能となります.
衝撃吸収制御
本研究では東大石川グループ研究室が提案している衝撃吸収制御(Maxwellモデル制御)を 用いて衝突後に物体との接触を維持しています. Maxwellモデル制御は,低反発ゲルを押したときのような柔らかい変形(塑性変形)の挙動を実現する手法で, 物体と高速に衝突しながら接触を維持する際に有効な手法です. 一般的なインピーダンス制御ではバネとダンパが並列接続されたモデルが用いられますが, Maxwellモデル制御では直列接続されたバネ・ダンパモデルを使用する点が特徴です. 本研究では,以下の図に示す通り,マグリンケージハンドのDIP関節(先端)を スティッフネス制御することでバネ力を発生させ,バネ力の時間変化からPIP関節(根元)を ダンピング制御することで直列接続されたバネ・ダンパモデルを表現しています.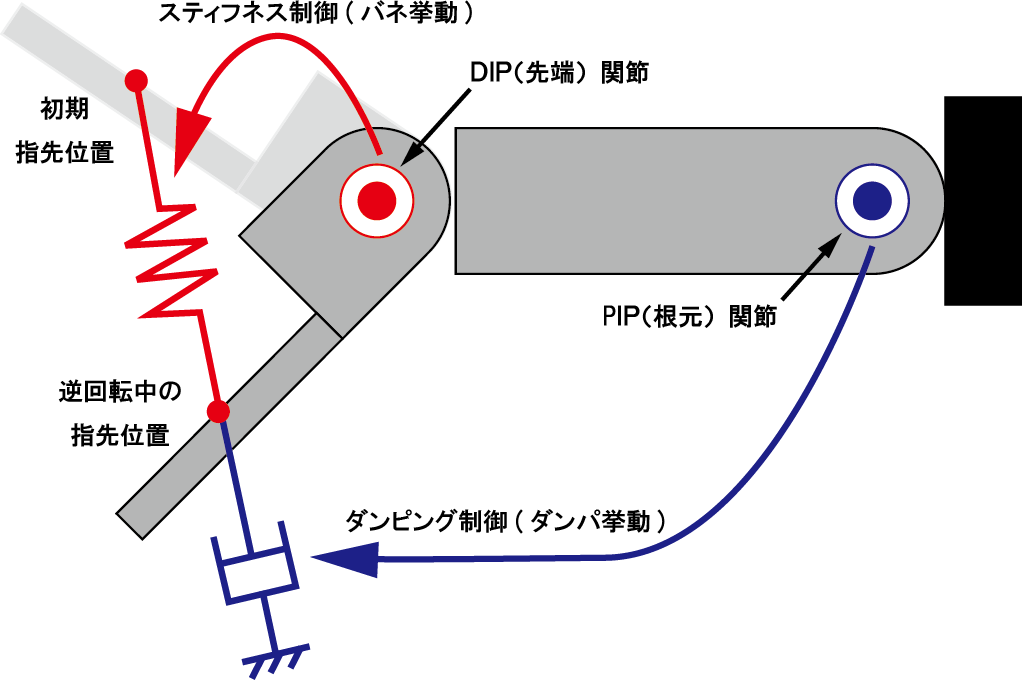
低衝撃・ノンストップ把持
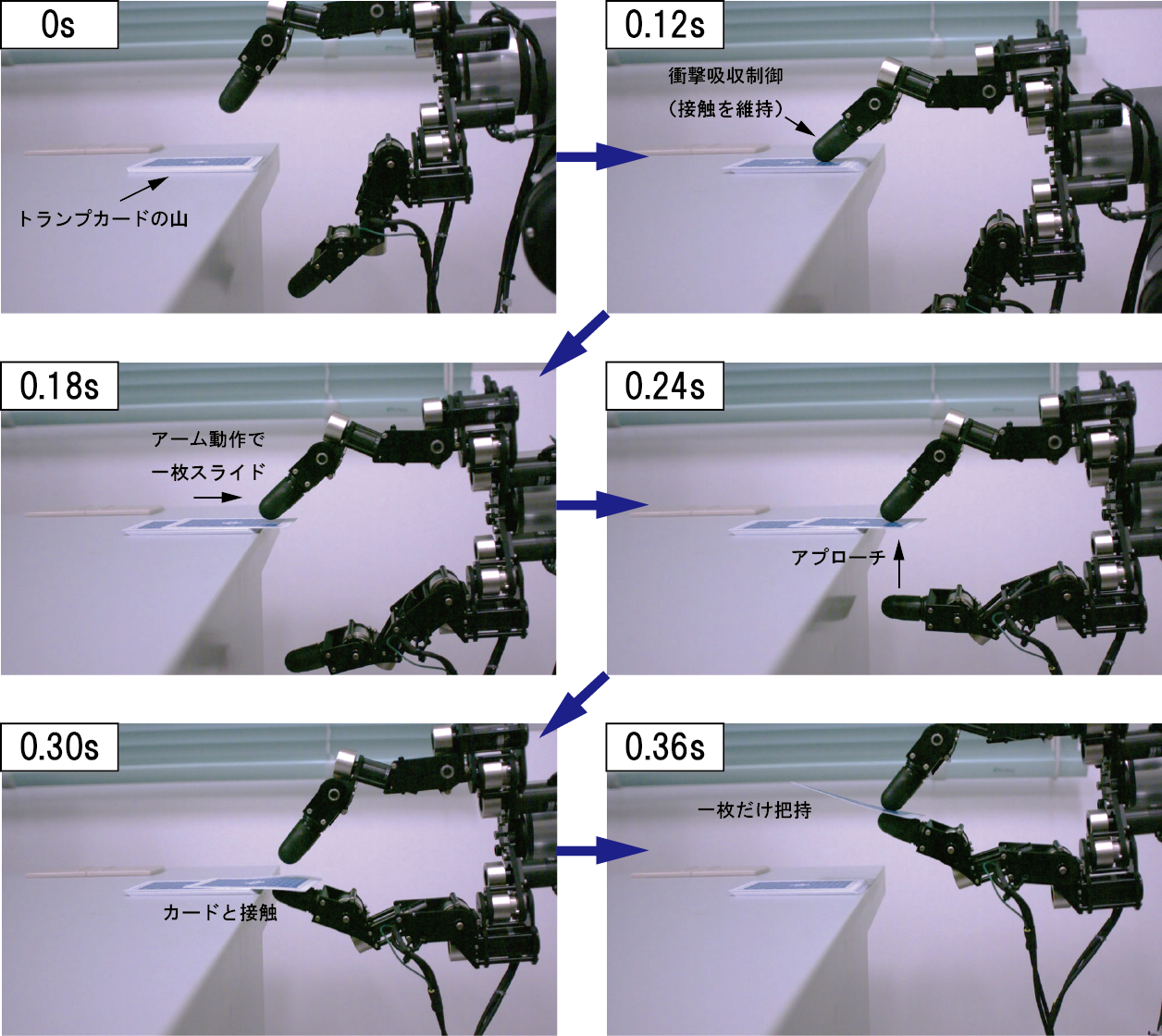
衝撃吸収制御を用いて机上のカードの山から一枚だけつかみ取る動作を実現しました. 上側の指を衝撃吸収制御することで,衝突後にカードとの接触を維持し, アーム手先の動作によりカード1枚を右方向にスライドさせます. この間に下側の指がカードに向かってアプローチすることで一枚だけ把持します. 触れることで物体と指先との位置関係を確定させるため,カードの山の高さが変化しても 把持が可能です(アームは一定の手先軌道・速度で動作するのみでOK). カードのほか,シール用紙や包装されたお菓子などを同一制御,同一パラメータで把持可能です.
動画
発表文献
- 小山佳祐,下条誠,妹尾拓,石川正俊:小型・低摩擦アクチュエータMaglinkageの開発とハンド応用, 日本機械学会ロボティクスメカトロニクス講演会2019(Robomech2019) (広島,2018.6.7) / 講演会論文集,2P1-H02. 日本機械学会ロボティクスメカトロニクス部門ROBOMECH表彰(学術研究分野)受賞
- 小山佳祐,下条誠,妹尾拓,石川正俊:小型・低摩擦アクチュエータ"MagLinkage"を用いた定衝撃・ノンストップ把持, 第37回日本ロボット学会学術講演会(RSJ2019) (東京,2019.9.6) / 講演会論文集,3E-2. 日本ロボット学会学術講演会第1回優秀研究・技術賞