研究背景
光の反射を利用して対象物との距離や角度を計測するセンサは世の中にたくさんあります. 代表的なものだと,ToF(Time of Flight),三角測量,反射光強度方式です. この中で,反射光強度方式ではフォトリフレクタなどの光素子を複数並べることで, 距離や角度を比較的,簡単に計測することができます. ただし,いずれの方式のセンサも,計測可能な対象物は,「光沢のない不透明な物体」に限定されています. 対象物の面に光沢(鏡面反射特性)がある場合や,面が透明な場合,センサ側で観測される反射光の特徴が 複雑となり,正確な距離や角度値への変換が困難となるためです.
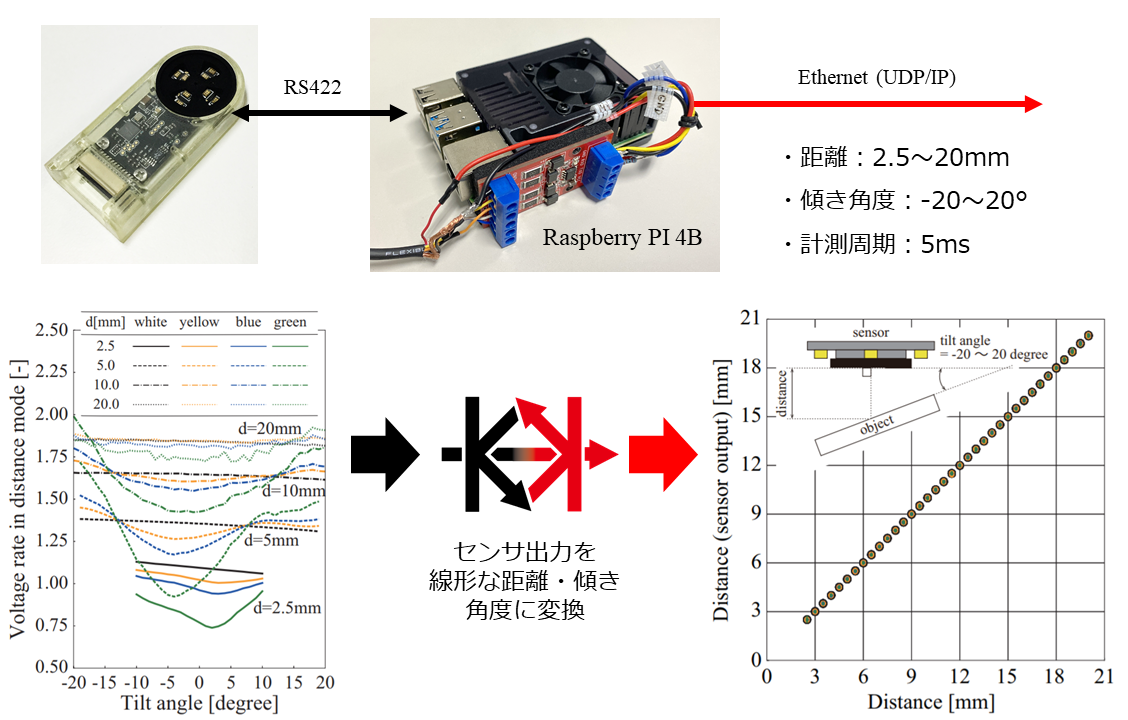
独自のAIキャリブレーションモデル
この問題を解決するために,複雑な反射光の特徴量から正確な距離・角度値への変換が可能な AIモデルを研究開発しています.このAIモデルは,①低次元の特徴量を高次元空間に拡大変換する独自アルゴリズムと ➁簡単な機械学習モデルの組み合わせで構成されます.実行時のメモリ消費量,計算コスト共に 極めて低い特徴があり,RaspberryPIなどの非力なエッジAI上にも搭載することが可能です. エッジAI上に搭載した場合でも,毎秒200回の周期で距離・角度への変換が可能です.
鏡面・透明物体の追従動作
独自のAIキャリブレーションモデルを用いることで,身の回りの様々な物体に対して距離と角度を 同時に計測可能となります.下の例では,スマートフォンの液晶や光沢のあるプラスチック板, 金属板(銅・アルミ),透明ガラス板などに対して指先面と物体面の間が一定距離・角度となるように, 常に追従動作を行っています.毎秒200回の周期で距離・角度値を取得できるため,移動する物体に 対しても滑らかな動作が可能です.
ガラス製試験管への自動位置決め
本技術を応用することで,円柱物体の中心に対してロボットの手先位置を自動調整することも可能です. 下の例では透明なガラス試験管の表面との距離・角度を計測することで,ロボット手先位置の誤差を修正しています. 試験管の初期位置がラフであったとしても自動的に位置決めができるため,専用の位置決め治具が不要で, また,ティーチングの要求精度も下げることが可能です.
動画
発表文献
- 小山 佳祐: ”高速・高精度近接覚センサの開発とロボットマニピュレーションへの応用”, 日本ロボット学会誌, Vol. 40, No. 5, pp. 393-398, 2022.